An Overview of Guided Policy Search
Relation to Model-free Policy Optimization Algorithms
Model-free policy optimization algorithms were described here.
- Direct Policy Search: learning complex, nonlinear policies with standard policy gradient methods
- Require a huge number of samples and iterations
- can be disastrously prone to poor local optimal
Guided Policy Search (GPS)
- Use
Differential Dynamic Programming (DDP)to generate “guiding samples”: assist the policy search by exploringhigh-reward regions. - An
importance sampledvariant of thelikehood ratio estimatoris used to incorporate these guiding samples directly into the policy search.
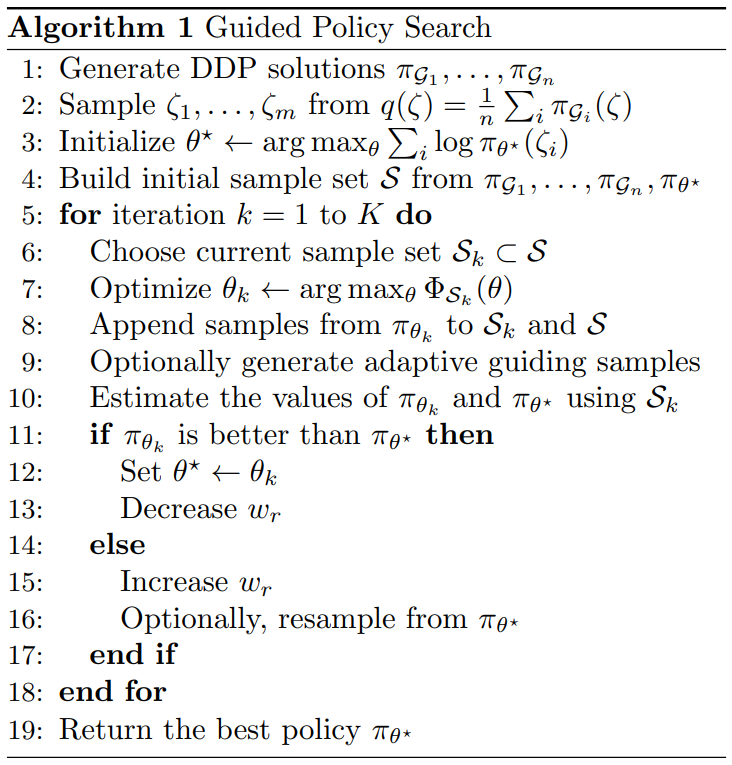
- GPS Algorithm Pseudocode