A Survey of UAV Hardware Platforms
AscTec Hummingbird

- Website: http://www.asctec.de/en/uav-uas-drones-rpas-roav/asctec-hummingbird/
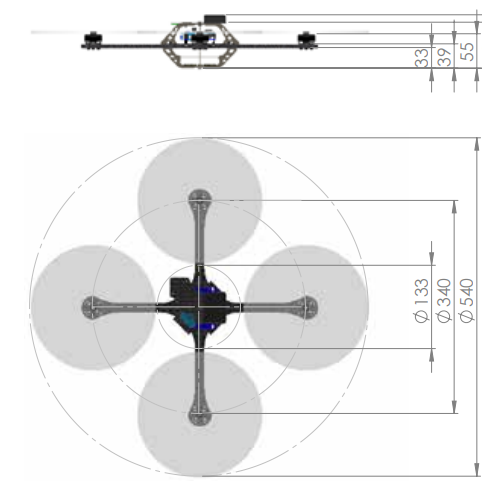
- Propeller size: 8”
- Max. thrust: 20N
- Max. payload: 200g
- Max. total weight: 710g
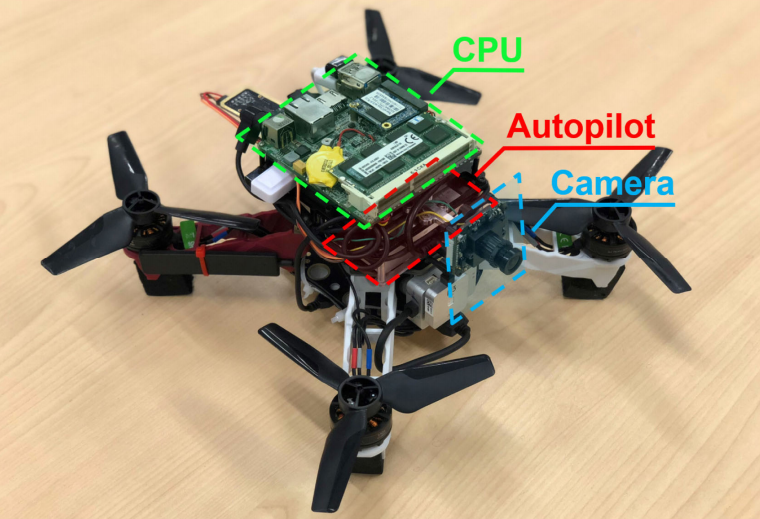
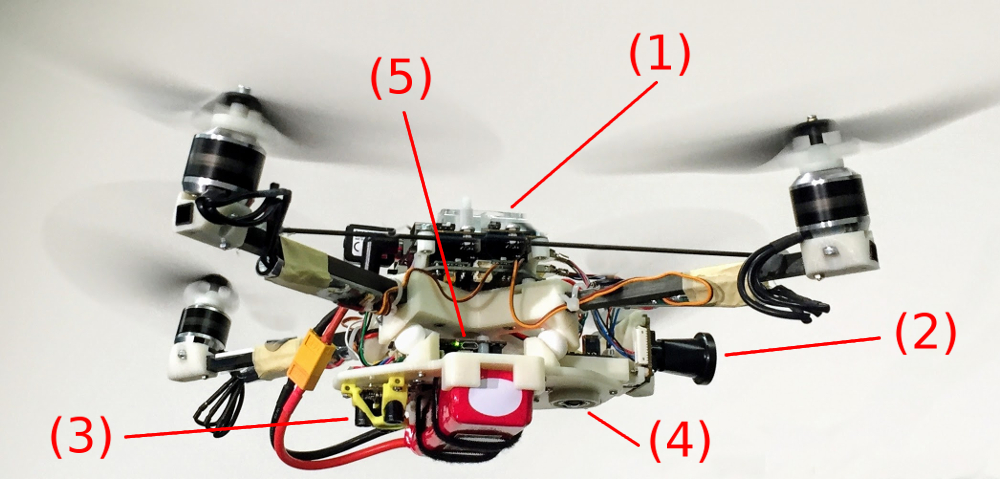
UZH RPG

- Video: http://rpg.ifi.uzh.ch/aggressive_flight.html
- (1) Onboard computer
- (2) Forward-facing fisheye camera: mvBlueFOX-MLC200w \(752 \times 480\) pixel
- (3) TeraRanger One distance sensor
- (4) Downward-facing camera
- (5) PX4 autopilot
- Motors are tilted by \(15^\circ\) to provide three times more yaw-control action, while only losing \(3\%\) of the collective thrust
MIT ACL

- Video: https://youtu.be/gwV0YRs5IWs
- Qualcomm SnapDragon Flight
- Intel NUC
- Intel RealSense Depth Camera D435
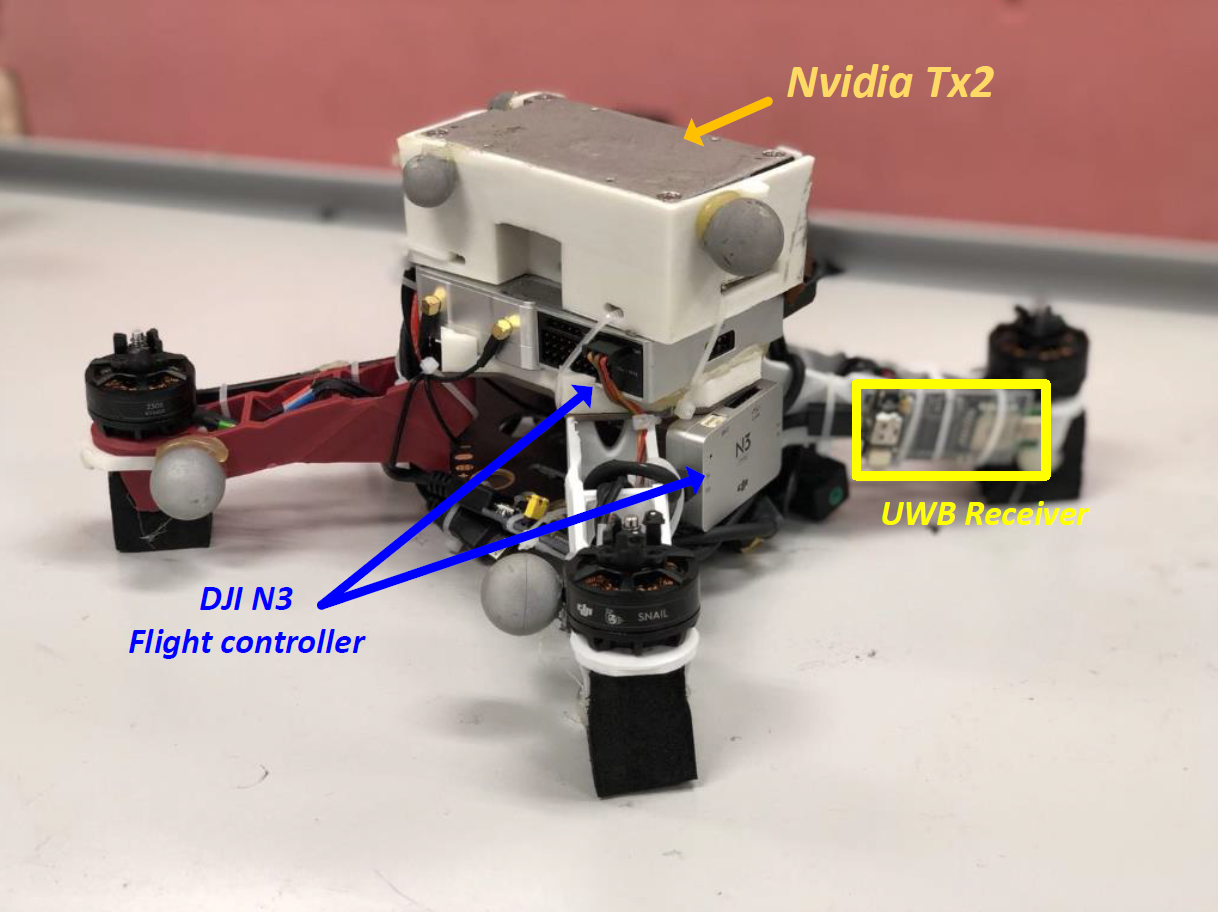
HKUST