A Survey of UAV Simulation With Reinforcement Learning
Simulation is an invaluable tool for the robotics researcher. In allows developing and testing algorithms in a safe and inexpensive manner, without having to worry about the time-consuming and expensive process of dealing with real-world hardware.
- They allow engineers to
identify errors earlyin the develpoment process. - Simulation systems provide not only
massive amounts of data, but also the labels required for training algorithms. - Provide a safe environment for learning from experience useful for RL methods.
The ideal simulator has three main characteristics:
Fast, to collect a large amount of data with limited time and compute, such as Mujoco.Physically-accurate, to represent the dynamics of the real world with high-fidelity.Photo-realistic, to minimize the discrepancy between simulated and real-world sensors’ observations.
PX4 Simulation Doc
AirSim
Air Learning
- Code
- Python
- State: Image, UAV state
- Action: Forward, Left, Right, Back
GymFC
- Code
- Python
- State: rotor speed, angular velocity error
- Action: control signals of each motor
Ethz reinmav-gym
- Code
- Python
- State: Position, quaternion, velocity
- Action: angular velocity, thrust
RAI
- Code
- C++
- State: Rotation Matrix, position, linear velocity, angular velocity
- Action: rotor thrusts
Drone Racing Simulators
- Velocidrone: https://www.velocidrone.com/
- The Drone Racing League (DRL): https://thedroneracingleague.com/
- Liftoff: https://www.liftoff-game.com/
- Unity: https://unity.com/
PaddlePaddle/RLSchool
- Code
- DDPG for UAV velocity control
- PARL-PPO for UAV control
- State: sensor measurements, flighting state and task related state.
- Action: voltage value of four propeller motors, each value is in range \([0.1,15.0]\).
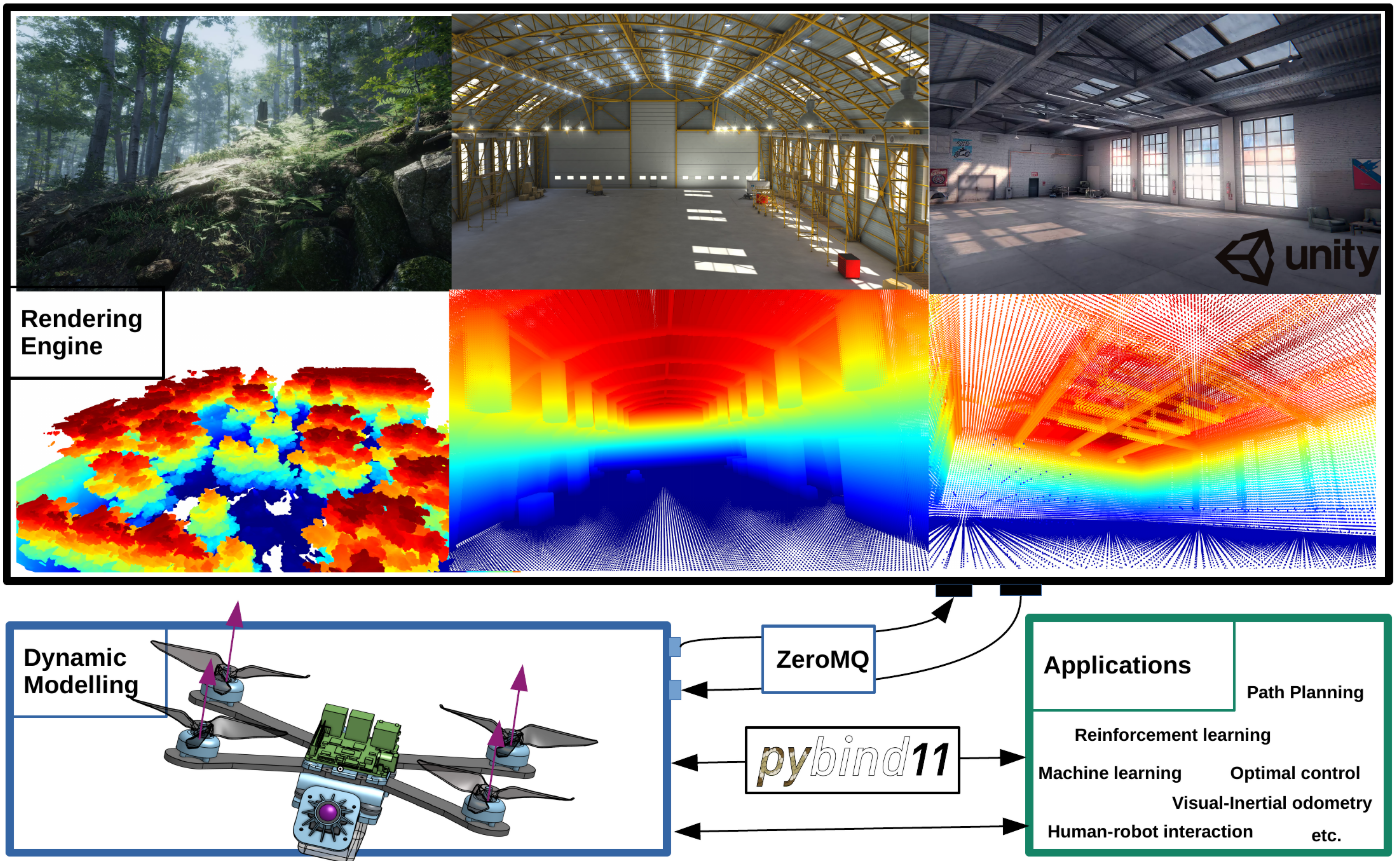
Flightmare
- https://uzh-rpg.github.io/flightmare/
- Code
- Two main components (decoupled and run independently):
- A configurable rendering engine built on Unity, up to
230Hzfor rendering block. - A flexible physics engine for dynamics simulation, up to
200000Hzfor dynamics block.
- A configurable rendering engine built on Unity, up to
- Trade-off between
accuracy and speedby the end-users. - The interface between the rendering engine and the quadrotor dynamics is implemented using high-performance asynchronous messaging library ZeroMQ.
- Multi-modal sensor suite:
- Visual: RGB, depth, semantic segmentation.
- IMU.
- 3D point-cloud of the scene.
API for RL, use the python wrapper to implement OpenAI-Gym style interface for RL tasks.- Interface for
multi-agentsimulation, which can simulate hundreds of quadrotors in parallel. - Integrate with a virtual-reality headset for interaction with the environment.
- Used for the following quadrotor tasks:
- quadrotor
control policy learning. - quadrotor
path-planningin a complex 3D environment.
- quadrotor
RotorS VS Hector VS AirSim VS CARLA VS FlightGoggles VS Flightmare
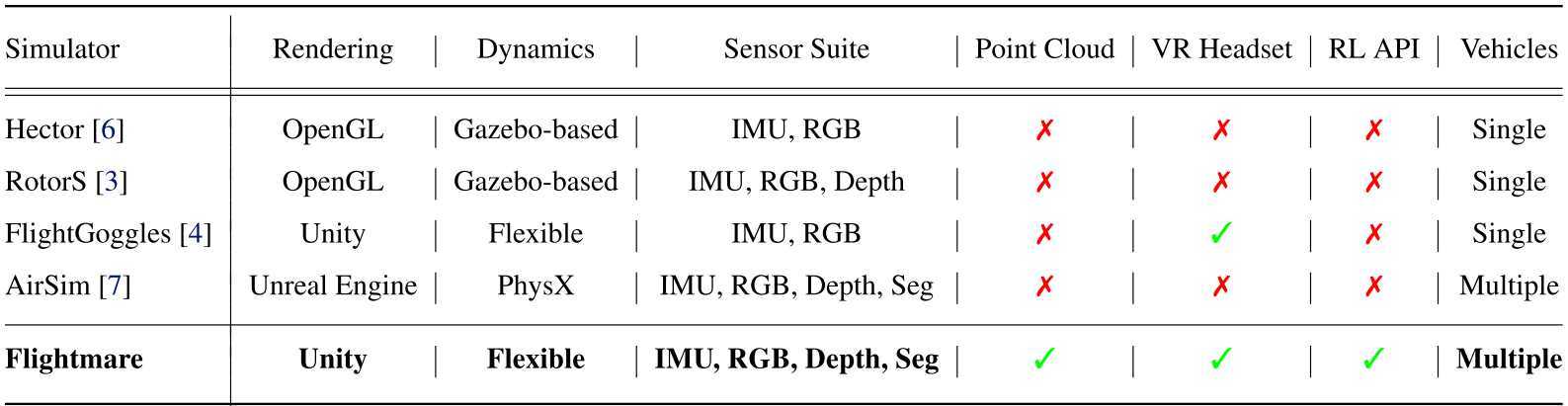
- RotorS
- built on Gazebo with ROS.
- provides several quadrotors such as AscTec Hummingbird, Pelican, and Firefly.
- used for path-planning, mapping, exploration, etc.
- Gazebo has
limited rendering capabilitiesand is not designed for efficient parallel dynamics simulation.
- Hector
- built on Gazebo with ROS.
- used for autonomous mapping and navigation with rescue robots.
- AirSim
Photo-realisticsimulator built on Unreal Engine.- limited simulation speed,
difficult to apply it to model-free RL tasks(e.g. training an end-to-end control policy for quadrotor stabilization or flying through a fast moving gate).
- CARLA
Photo-realisticsimulator built on Unreal Engine.- mainly made for
autonomous drivingresearch and only provides dynamics of ground vehicles.
- FlightGoggles
- photo-realistic sensor simulator for
perception-driven robotic vehicles. - exteroceptive sensors:
- RGB-D cameras.
- distortion-free.
- camera projection model with optional motion blur, lens dirt, auto-exposure, and bloom.
- parameters can be changed via API using ROS param or LCM config.
- time-of-flight distance sensors.
- a downward-facing single-point range finder for altitude estimation.
- infrared radiation (IR) beacon sensors.
- provide image-space measurements of IR beacons in the camera’s field of view.
- the beacons can be placed at static locations or on the moving objects.
- RGB-D cameras.
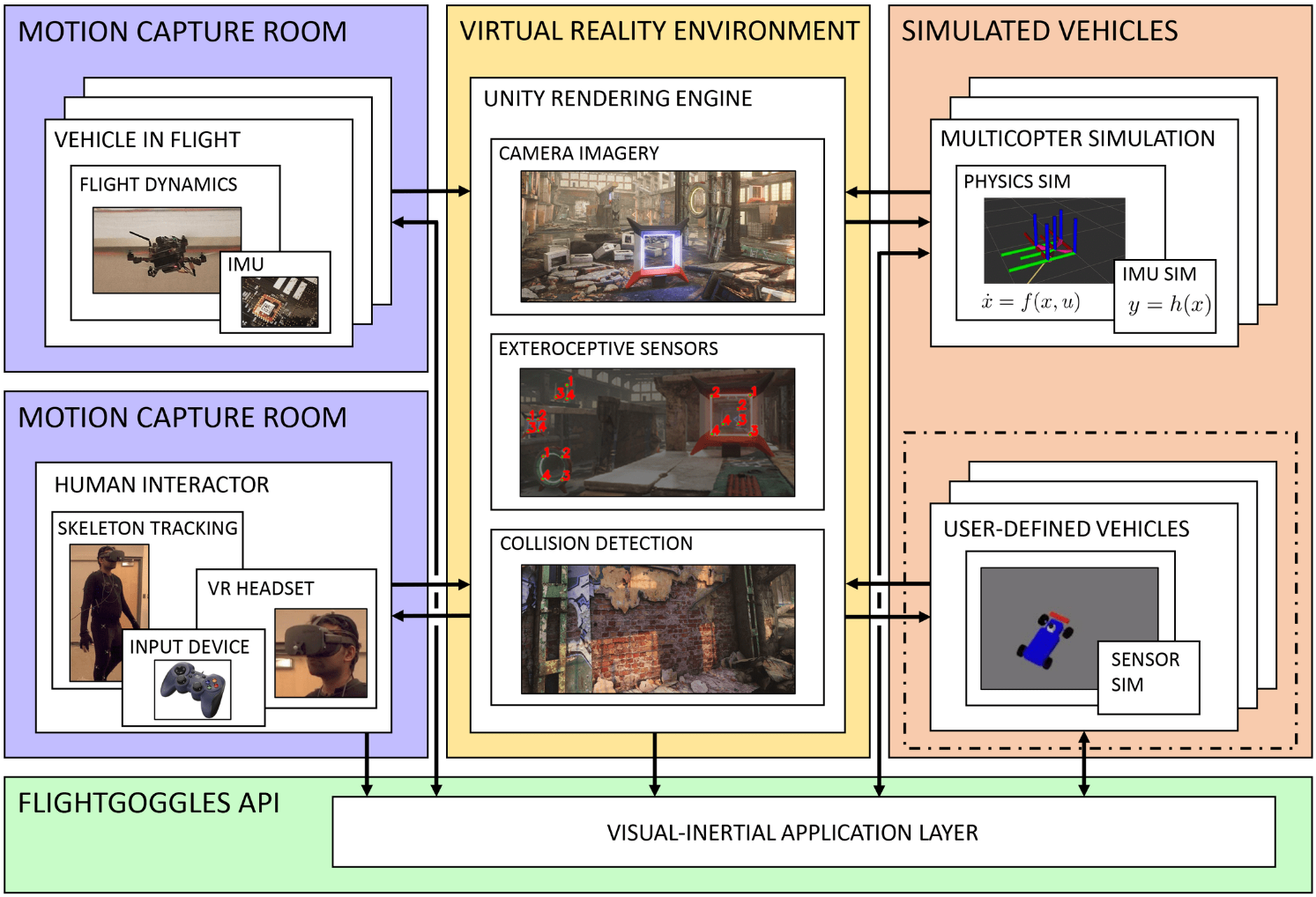
- two separate components (modular architecture):
- a photo-realistic rendering engine built on Unity.
utilize position and orientation information of vehicleto simulate camera imagery and exteroceptive sensors, and to detect collisions (using polygon colliders).- dynamic elements, such as moving obstacles, lights, vehicles, and human actors can be added.
- a quadrotor dynamics simulation implemented in C++.
- vehicle state is updated at
960Hz.
- vehicle state is updated at
- a photo-realistic rendering engine built on Unity.
vehicle-in-the-loop simulation(use motion capture system).- circumventing the need to estimate complex and hard-to-model interactions such as
aerodynamics, motor mechanics, battery electrochemistry, and behavior of other agents. - acquire the
pose of the vehiclein real time. real dynamics,real inertial sensing.- can be seen as an extension of customary
hardware-in-the-loopconfigurations.
- circumventing the need to estimate complex and hard-to-model interactions such as
- API provide:
- dynanics states.
- control inputs.
- sensor outputs.
- Message interface:
- ROS.
- LCM.
- useful for rendering camera images given trajectories and inertial measurements from flying vehicles in real-world.
- decoupling the dynamics modelling from the photo-realistic rendering engine.
- Applications:
- visual inertial navigation research for fast and agile vehicles:
- Visual inertial odometry (VIO) to estimate the vehicle state.
- change environment and camera parameters and thereby enables us to quickly verify VIO performance over a multitude of scenarios.
- human-vehicle interaction.
- active sensor selection.
- multi-agent systems.
- AlphaPilot challenge:
- an autonomous drone racing challenge.
- test the autonomous guidence, navigation, and control capability in a realistic simulation environment.
- sensors data provide (via ROS API):
- (stereo) cameras.
- IMU.
- downward-facing time-of-flight range sensor.
- infrared gate beacons.
- autonomous systems obtains
sensor measurementsandprovide collective thrust and attitude rateinputs to the quadrotor’slow-level rate mode controller.- methods:
end-to-end learning basedmethod.traditional pipelines: estimation, planning, and control.- estimation: Kalman filter, ROVIO, VINS-Mono, etc.
- planning: visual servo using infrared beacons, polynomial trajectory planning, manually-defined waypoints, sampling-based techniques for building trajectory libraries.
- control: linear control, model predictive control, geometric and backstepping control.
- methods:
- environment: FlightGoggles Abandoned Factory.
- the exact gate locations were subject to random unknown perturbations.
- Score = 10 X gates - time.
- visual inertial navigation research for fast and agile vehicles:
- photo-realistic sensor simulator for
Rendering Engine
- built with Unity.
- various high-quality 3D environments: warehouse, nature forest, etc.
- users can add environment perturbation, such as wind.
- A new environment or asset can easily be created or directly purchased from the Unity Asset Store.
- Sensors:
- RGB cameras with ground-truth depth and semantic segmentation.
- users can change the
camera intrinsicssuch as field of view, focal length, and lens distortion. snesor noise: also can simulate physical effects on the camera includingmotion blur, lens dirt, and bloom.
- users can change the
- Rangefinders.
- Collision detection between agents and its surroundings.
- RGB cameras with ground-truth depth and semantic segmentation.
- Provide a graphical user interface (GUI) as well as a C++ API for users to extract ground-truth point clouds of the environment.
Dynamic Modelling
- A gazebo-based quadrotor dynamics,
slower but more realistic.- basic model: noise-free.
- more advanced rigid-body dynamics: including friction and rotor drag.
- Real-world dynamics, offers the interface to combine real-world dynamics with photo-realistic rendering.
- inertial sensing and motor encoders are directly depend on the physics model.
- A parallelized implementation of classical quadrotor dynamics, useful for large-scale
RL applications. - control modes:
body-rate mode: implement a low-level controller for tracking thedesired body rates.rotor-thrusts mode: low-level controller generatesdesired rotor thrustsfor each motor.
Learning a Policy for Quadrotor Control
Three tasks:
- stabilize a quadrotor from randomly initialized poses.
- state: \((p, \theta, v)\).
- action: \((c, \omega_x, \omega_y, \omega_z)\).
- stabilize a quadrotor from randomly initialized poses under a single
motor failure.- state: \((p, \theta, v, \omega)\).
- action: \((f_1, f_2, f_3)\).
- control a quadrotor to fly through static gates as fast as possible.
- state: \((p, \theta, v, \omega, p_{gate}, \theta_{gate})\).
- action: \((f_1, f_2, f_3, f_4)\).
Method:
- Train neural network controllers for each task using
PPOalgorithm and OpenAIstable-baselinesimplementation. - Simulate 100 quadrotors in parallel for trajectory sampling and collect in total 25 million time-steps for each task.
Point Cloud and Path Planning
- Provide an interface to export the 3D information of the full environment as point cloud with any desired resolution.
- illustrate a section of the complex nature forest environment, with a resolution of 0.1m and contains detailed 3D structure information of the forest.
- compute the shortest collision-free path between two points, from point
Ato pointB. - run the OMPL on the point-cloud extracted from the forest with a default solver for path-planning.
Other Applications
- Virtual reality and safe human-robot interaction.
- Can be used to study the implications of large scale-multi robot systems.
- Can be extremely useful for testing odometry and SLAM systems.
- Can also be used to learn deep sensorimotor policies via imitation learning.